
Peiyu Yang (杨沛禹)
Patrick Yang
Ph.D. in Robotics (2025.11-Present), Istituto Italiano di Tecnologia (IIT)
M.Sc. in Robotics (2023.9-2025.10), Delft University of Technology (TUDelft)
B.Eng. in Automation (2019.9-2023.6), Beijing Institute of Technology (BIT)
I am currently a Ph.D. student at the Dynamic Legged Systems (DLS) Lab, Istituto Italiano di Tecnologia (IIT), which I joined in November 2025. I am fortunate to be advised by Dr. Claudio Semini, Dr. Giulio Turrisi, and Dr. Victor Barasuol. I received my M.Sc. degree from TU Delft in October 2025, where I worked in the Cognitive Robotics Department under the supervision of Dr. Cosimo Della Santina and Dr. Jiatao Ding. Prior to that, I earned my bachelor's degree from BIT, where I conducted research at the ININ Lab, School of Automation, under the guidance of Dr. Wenjie Song.
In my view, robots are more than mere cold machines—they are a seamless fusion of physical structure and computational intelligence, guided by human intent. They embody the synergy of hardware engineering, control algorithms, and high-level reasoning, forming an intricate dance between theory and reality, woven together by feedforward and feedback dynamics. This intricate and seamlessly orchestrated interplay captivates me.
I am always open to academic collaborations and discussions—please feel free to reach out!
Research Interests: Bio-inspired Robot, Optimal Control, Reinforcement Learning
Publications
Published
Generative Design of XingT, A Human-sized Heavy-duty Bipedal Robot
Yizhao Qian, Peiyu Yang, Weicheng Liu, Shuangyuan Sun, Mengyin Fu, and Wenjie Song
International Conference on Robotics and Biomimetics (ROBIO), 2022
PDF
Best Paper in Biomimetics
On-the-Fly Jumping with Soft Landing: Leveraging Trajectory Optimization and Behavior Cloning
Edoardo Panichi, Jiatao Ding, Vassil Atanassov, Peiyu Yang, Jens Kober, Wei Pan, and Cosimo Della Santina
IEEE/ASME Transactions on Mechatronics (TMECH), 2025
Link
Manuscripts
Versatile, Robust, and Explosive Locomotion with Rigid and Articulated Compliant Quadrupeds
Jiatao Ding, Peiyu Yang, Fabio Boekel, Jens Kober, Wei Pan, Matteo Saveriano, and Cosimo Della Santina
Submitted to The International Journal of Robotics Research (IJRR), 2025
LinkThesis
UPPS-RL: Unified Predictive and Passive Safety In Quadrupedal Locomotion Control Using Reinforcement Learning
Peiyu Yang
M.Sc. Thesis, Delft University of Technology, October 14, 2025
Supervisors: Prof. Cosimo Della Santina and Dr. Jiatao Ding
PDFPatents
| Peiyu Yang, Wenjie Song, Weicheng Liu, et al. A Wheel-legged Robot with a Balancing Device |
| Wenjie Song, Yizhao Qian, Peiyu Yang, et al. A Five-bar-linkage-based Leg Structure for Bipedal Robots |
Selected Projects
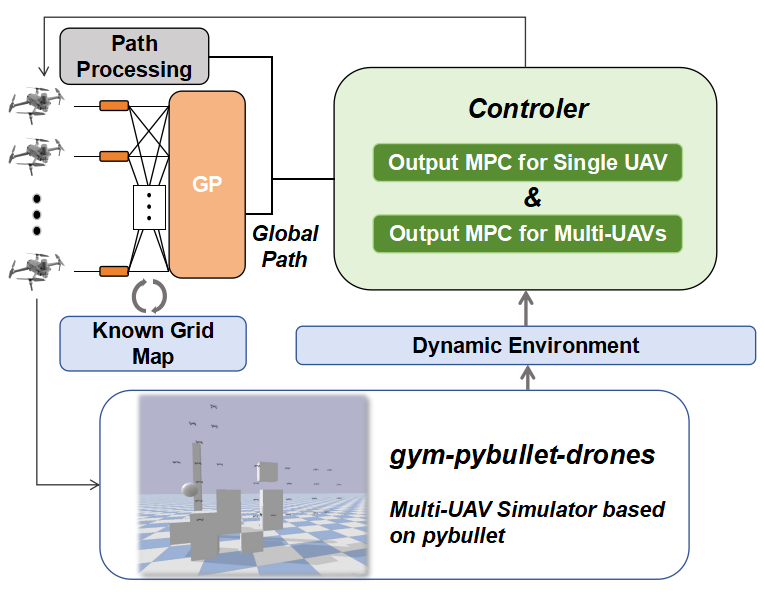
Two-stage Multi-UAVs Planning and Control
- Presented a two-stage multi-UAV path planning solution with modified A* as global planner, and MPC combining with APF as local planner.
- Simulated formations of a cluster comprising 27 UAVs in an obstacle environment.
- Course project at PDM and MPC at TU Delft
Design and Fabrication of a Legged Robot Prototype: Phase II
- Designed a self-adaptive robotic leg based on Hoecken’s linkage and pantograph.
- Proposed a damping compliant method for adaptive structure of the pantograph, which can significantly improve the flexibility of the adaptive structure.
- Internship project at École Polytechnique de Montréal
Experience


Joint Ph.D. Student @ IIT & University of Genoa
Supervisor: Dr. Claudio Semini
Working on learning-based control for locomotion and manipulation.

M.Sc Robotics @ TU Delft
Supervisor: Dr. C. (Cosimo) Della Santina
Worked on safe locomotion for quadrupedal robots.

Robot summer school @ ETH RobotX
Project: Robot summer school
Worked on path planning and object detection for mobile robots.

B.Eng Automation @ BIT
Supervisor: Dr. Wenjie Song
Worked on bio-inspared robot design. With final grade 87.44.
Mitacs Internship @ Polytechnique Montréal
Supervisor: Dr. Lionel Birglen
Worked on self-adaptive robotic leg design.

GEARS Program @ North Carolina State University
Supervisor: Dr. Andre Mazzoleni
Worked on target detection and kinematic reconstruction Based on computer vision.
Awards
| First Prize | "Challenge Cup" National College Student Curricular Academic Science and Technology Works Competition | 2024 |
| First Prize | National College Mechanical Innovation Competition(Beijing) | 2022 |