Research

Design and Fabrication of a Legged Robot Prototype: Phase II
- Designed a self-adaptive robotic leg based on Hoecken’s linkage and pantograph.
- Proposed a damping compliant method for adaptive structure of the pantograph, which can significantly improve the flexibility of the adaptive structure.
- Internship project at École Polytechnique de Montréal
CourseWork
Two-stage Multi-UAVs Planning and Control
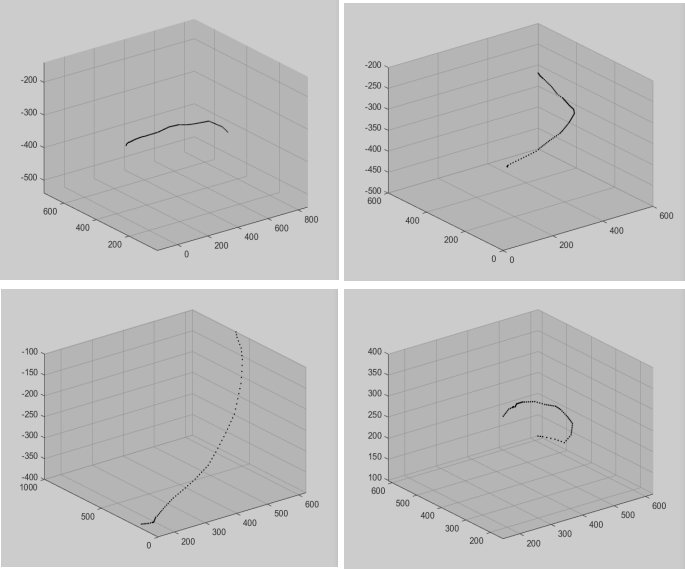
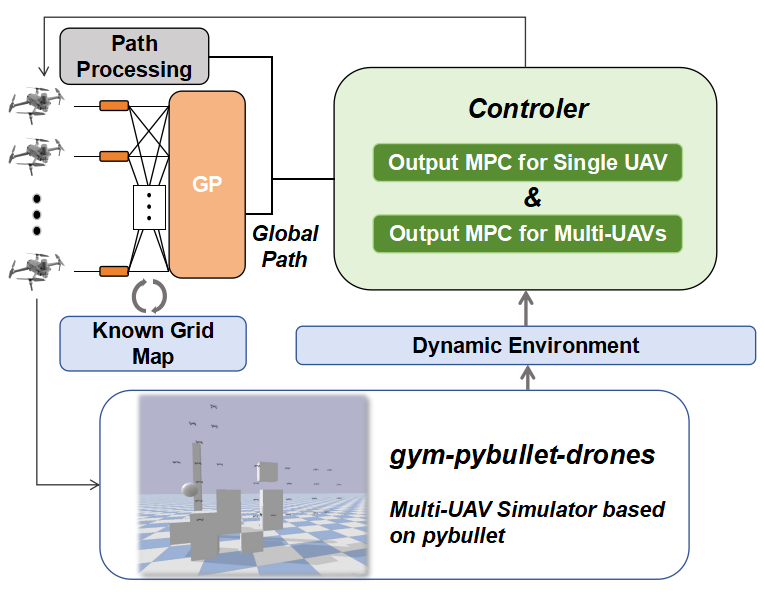
- Presented a two-stage multi-UAV path planning solution with modified A* as global planner, and MPC combining with APF as local planner.
- Simulated formations of a cluster comprising 27 UAVs in an obstacle environment.
- Course project at PDM and MPC at TU Delft